
- Mis on robot? Maailma esimene robot.
Robot on mehhaaniline või elektrooniline seade, mis suudab teatud ülesandeid iseseisvalt või pooliseseisvalt teostada. Maailma esimene robotiks peetav seade oli “Unimate”, tööstusrobot, mille esimese mudeli ehitas 1954. aastal George Devol ning seda turustas ja tootis 1961. aastal ettevõte nimega Unimation. Unimate’i peamiseks eesmärgiks oli tööstuslikes keskkondades ohtlike ja korduvate ülesannete automatiseerimine, nagu keevitamine.

- Robotite arendamise põlvkonnad. Nimeta ja seleta.
Robotite arendamise põlvkondadeks võib jagada:- Esimene põlvkond (Varajased robotid):
- 1950ndad kuni 1960ndad: Esimesed robotid olid lihtsad ja piiratud funktsionaalsusega. Need olid enamasti tööstusrobotid, mis täitsid korduvaid ülesandeid, näiteks autotööstuses keevitamine või osade paigaldamine.
- Tehnilised omadused: Rasked, jäigad, üheülesandelised.
- Teine põlvkond (Programmeeritavad robotid):
- 1970ndad kuni 1980ndad: Robotitele hakati lisama programmeeritavust. Nende robotite juhtimiseks kasutati programmeerimiskeeli ja kontrollerid muutusid keerukamaks.
- Tehnilised omadused: Paindlikumad, võimalus programmeerida erinevaid ülesandeid.
- Kolmas põlvkond (Tarkvara juhitud robotid):
- 1990ndad kuni 2000ndad: Tarkvara mängis suuremat rolli robotite juhtimises. Robotid said võime õppida ja kohanduda keskkonnaga.
- Tehnilised omadused: Tarkvara juhitavad, adaptiivsed, suurem autonoomia.
- Neljas põlvkond (Koostöörobotid ehk kobotid):
- 2010ndad kuni tänapäev: Kobotid on mõeldud koostööks inimestega. Need on ohutud, paindlikud ja suudavad töötada inimestega samas ruumis.
- Tehnilised omadused: Inimestega koos töötavad, tundlikud, nutikad.
- Esimene põlvkond (Varajased robotid):
- Miks manipulaatorid ei ole robotid?
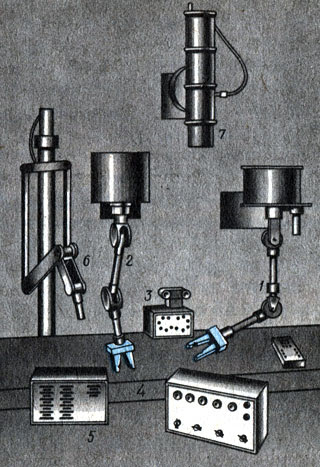
Manipulaatorid on masinaosad, mis on mõeldud objektide hoidmiseks, tõstmiseks või teisaldamiseks. Need ei ole iseseisvad seadmed, vaid osa suuremast süsteemist või masinast. Robot aga on iseseisev seade, mis suudab iseseisvalt või pooliseseisvalt ülesandeid täita, kasutades mitmeid manipulaatoreid ja muid komponente. - Mis on masinate eelised võrreldes inimtööjõuga?
Masinate eelised võrreldes inimtööjõuga hõlmavad suuremat täpsust, kiirust, järjepidevust, võimet töötada ohtlikes keskkondades ja vähendatud vigade taset. Masinate kasutamine võib samuti vähendada tootmiskulusid ja suurendada tootmise efektiivsust ning võimaldada inimestel keskenduda loomingulisematele ülesannetele. - Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
Et masinat saaks nimetada robotiks, peavad olema täidetud järgmised tingimused:
- Programmide ja juhtimissüsteemide abil juhitav.
- Võimeline reageerima ümbritsevale keskkonnale ja vastavalt sellele kohanduma.
- Omab võimet teostada füüsilisi ülesandeid.
- Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
Mehhatroonikud võiksid töötada mitmesugustes Eesti tööstusettevõtetes, sealhulgas autotööstuses, elektroonikatööstuses, masinaehituses, robootikas, meditsiiniseadmete tootmises, toiduainetetööstuses ja paljudes teistes valdkondades, kus on vaja mehaanika, elektroonika ja infotehnoloogia integratsiooni.
Definitsioonid:
- Robot: Tehniline seade või masin, mis on võimeline teatud ülesandeid iseseisvalt või pooliseseisvalt teostama.
- Robootika: Tehnoloogia ja teadusharu, mis tegeleb robotite disaini, arendamise, tootmise ja kasutamisega.
- Manipulaator: Masinaosa või seade, mis on mõeldud objektide hoidmiseks, tõstmiseks või teisaldamiseks.
- Mehhatroonika: Interdistsiplinaarne valdkond, mis hõlmab mehaanika, elektroonika ja infotehnoloogia integratsiooni süsteemide kavandamisel ja tootmisel.
- Andur: Seade, mis tuvastab ja mõõdab keskkonna muutusi ning muudab need elektrilisteks signaalideks.
- Täitur: Seade, mis teostab mingit tööd või liigutust, sageli vastusena kontrolleri juhenditele.
- Kontroller: Seade või süsteem, mis juhib ja koordineerib teiste seadmete või masinate tegevust vastavalt etteantud juhenditele või programmidele.
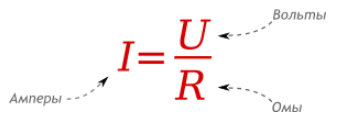
Закон Ома
Закон Ома — главный закон электричества
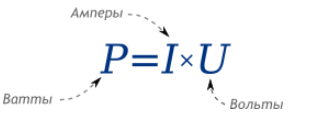
Мощность
Мощность — мера скорости трансформации электрической энергии в другую форму
Зная закон Ома, можно заметить, что мощность можно рассчитать иначе:
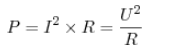
Мир не идеален и часть электроэнергии непременно трансформируется в тепло. Из-за этого и
греются компьютеры, телефоны, телевизоры и другая электроника.
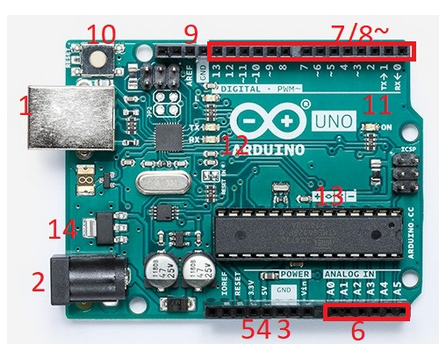
- USB pistik (USB – Universal Serial Bus) port. USB pistiku abil saab Arduino arendusplaadile voolu anda ja programmikoodi laadida. Arduino kasutab USB B tüüpi pistikut./Разъем USB (USB Порт) – Может использоваться для питания схем, а также для связи с компьютером.
- Voolupesa. Voolupessa saab ühendada voolujuhtme, millega Arduinole voolu anda. /Разъем Питания (от батареи) – Может использоваться с блоками питания 9 – 12 Вольт.
- GND (GND – ground, eesti k maandus) pesad. Nende pesade kaudu käib vooluringi maandamine.
- 5V (V – volt) pesa. 5V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 5 voldise vooluga.
- 3,3V pesa. 3,3V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 3.3 voldise vooluga.
- Analoogpesad (A0-A5) loevad signaali analoogsensoritest ja teisaldavad selle digitaalkujule, mida programm saab lugeda ja pärast signaali töötlemist digitaalpesa kaudu väljastada. Analoogpesa on võimalik vajadusel kasutada ka signaali väljastamiseks./Порты (Analog In, Power In, Ground, Power Out, Reset) – аналоговые, входящие, исходящие, питание и земля.
- Digitaalsed pesad (D0-D13). Nende abil saab lugeda ja väljastada digitaalsignaali. 15
- Pulsilaiusmodulatsiooni (Pulse-Width Modulation (PWM)) pesade abil saab simuleerida analoogväljundit./Порты (ARef, Ground, Digital, Rx, Tx) – опорное напряжение, земля, цифровые порты, порты приема и передачи данных.
- AREF pesa abil saab vajadusel lisapesana lugeda kindla tugevusega analoogsisendit.
- Lähtestamise nupp (Reset button) – Lähtestamise nupu vajutamisel taaskäivitatakse Arduino arendusplaadile laetud lähtekood. Kui programmi töö on katkenud saab nupu abil programmi taaskäivitada. Samuti on nupp mugav viis testimiseks, kui on tarvis koodi mitu korda jooksutada saab seda teha nupule vajutades. /(сброс) – ручной перезапуск платы Arduino, приводит к перезапуску вашей программы.
- Toite LED (LED – Light-emitting Diode) tuli. Toite LED tuli läheb põlema, kui Arduino arendusplaat on ühendatud vooluvõrguga. Kui pärast vooluga ühendamist tuli ei lähe põlema, on oht, et arendusplaadiga on midagi valesti./Индикатор (Индикатор питания) – сигнализирует о подаче питания на плату Arduino.
- TX (TX – Transmit) RX (RX – Receive) LED tuled – Nende LED tulede abil on aru saada, kui arendusplaat võtab andmeid vastu või saadab neid välja. Kui andmeid saadetakse, põleb TX LED tuli, kui andmeid vastu võetakse, põleb RX LED tuli./Индикатор (RX: Прием) – Используется для индикации приема данных, если конечно это прописано в программе.Индикатор (TX: Передача) – Используется для индикации передачи данных, если конечно это прописано в программе.
- ATmega328P mikrokontroller, juhib Arduino Uno arendusplaadi tööd.
- Pingeregulaator. Pingeregulaator reguleerib arendusplaadi vooluringi lastavat pinget. Kui pinge on liiga suur, muudab pingeregulaator selle plaadile sobivaks.
Дарья Хальченко, Atlas от Boston Dynamics, создан в США, цель была максимально имитировать человека. Ничего особо-интересного в реферате не рассказывалось (как по мне). Он нигде не используется так как он ещё прототип на стадии разработки (в реферате упоминалось противоположное). Не поймите меня неправильно, робот действительно революционный, но по моему мнению реферат этого не показал (может быть только через видео). 6/10
Мария Горбунова,
Iron Scrap – вертикальный спиннер – CN
GodSpeed – вертикальный спиннер – IN
Путевой-23 – вертикальный спиннер – RU – Презентация очень хорошо оформлено и объяснено 9/10.
Давид Леннук, Кровяная рука (названия нет) – Подробно и просто, концепты хорошо развиты 8/10.
Богдан Сергачёв, ЭМО – Прикольно, презентация была реализована очень хорошо, и объяснено понятно 7/10.
Александр Милишенко, ROBOT FIGURE 01 от Microsoft, OpenAI и BMW, очень подробно, информации много и запомнить всё сложно, но интересно.
София Мухина, Robonaut 2 от NASA – Стандартная презентация 6/10.
Алексндра Семёнова, Moley – Робот кухня – Очень много информации и текста, сам робот интересный, всё-таки выиграл в МастерШефе, 4/10.
Кирилл Сатс, FFL – First Lego League, соревнования робототехники на ЛЕГО, роботы Mindstorm, зачитывание текста по началу, но через время рассказ становился интересней, человек разбирается и это видно, презентация очень хорошая 9/10.
Давид Мирсет, Pepper – скучновато но интересно, стандартная презентация с зачитыванием 5/10.
Елизавета Остапьюк, Sophia – презентация стандартная с зачитыванием, но человек знает о чём говорит, 6/10
Валерия Аллик, Geminoid – зачитывание с экрана, интересно, но презентация максимально шаблонная и скучная, о работе самого робота мало что написано. 3/10
Роман Сандаков, TALOS – робот строитель, презентация среднячок, но явно лучше остальных, 6.5/10